Project introduction:
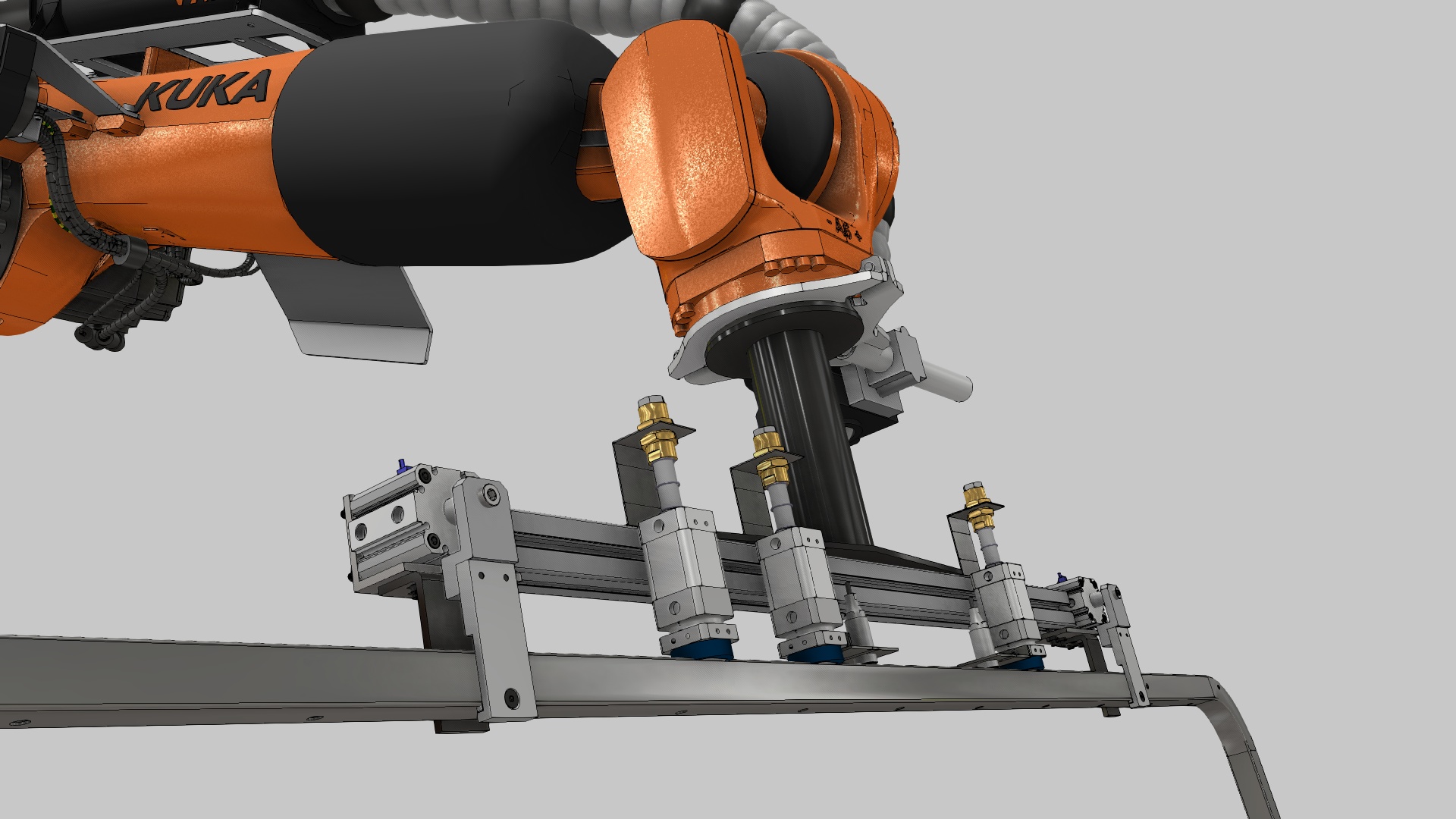
Automated system for loading and unloading workpices in metalworking machines. An industrial robot transports parts to and from the working areas of metalworking machines, monitors and controls the production process for each product type. A End of arm tooling (EOAT) with a specific design ensures reliable gripping of the work-pieces.
Project details:
In this project, an existing robotic system for automated loading/unloading was upgraded with an additional number of machines to handle а new types of work-pieces. In order to service these new types of work-pieces, it was necessary to rebuild the existing EOAT using magnetic grippers. Pneumatic clamps were developed to guarantee reliable and problem-free access to the details in the working areas of the machines. The robot software was adapted to support the new executive devices. The robot’s communication channels were upgraded to ensure communication with the new machines. Communication with part of the machines was based on the PROFINET, while the rest of them used straight discrete signals. New program modules implementing the defined production processes of each of the products were developed. The product-specific gripping method resulted in the use of separate motion paths of the robot arm when accessing the machines, as well as when stacking the finished products. The safety systems of the robotic cell were revised and expanded.
Link to Video