Project information:
This factory layout development was designed to evaluate the possibility of automating the process of packaging stacks of envelopes used for the storage of surgical instruments.
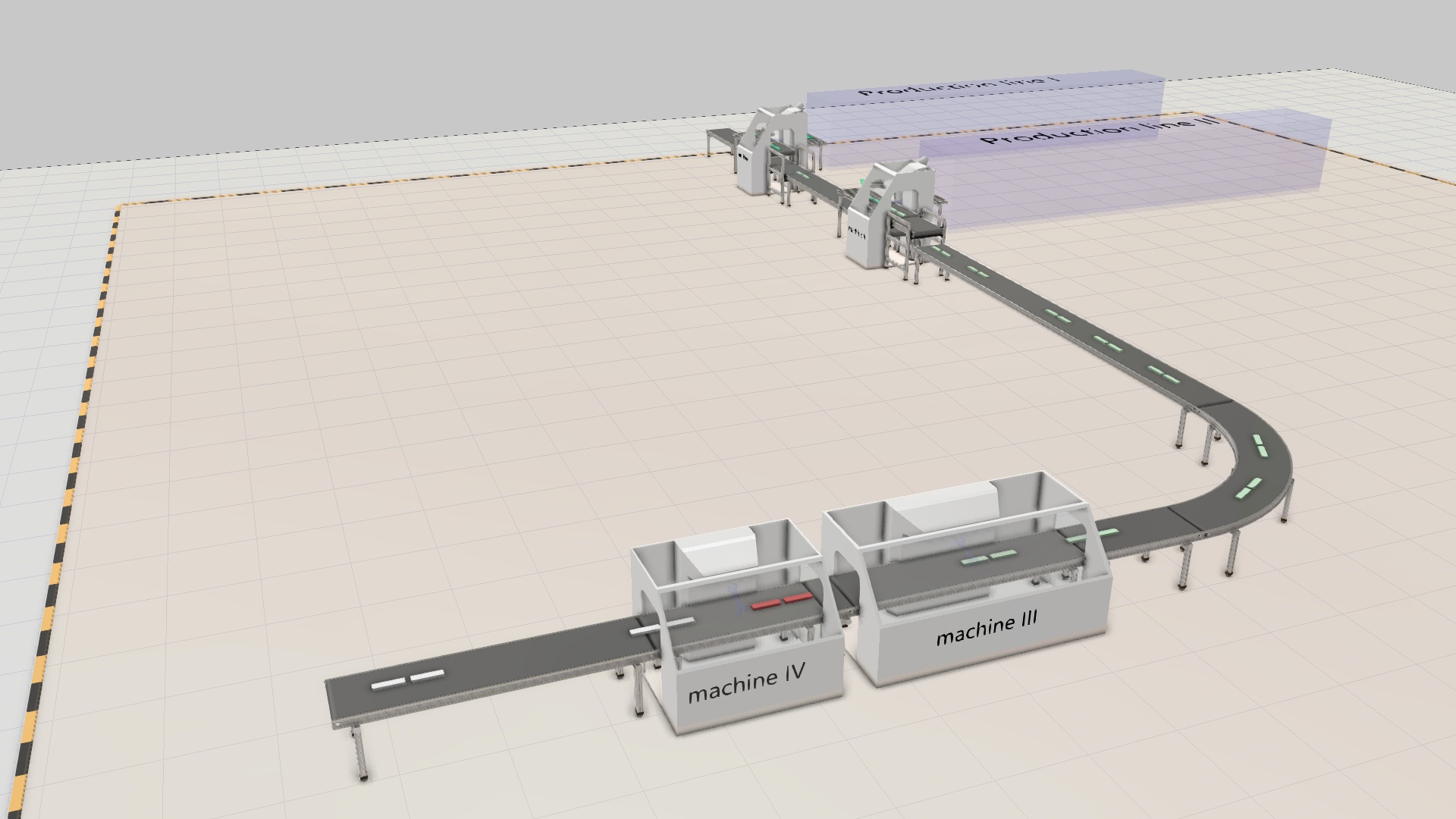
The process consists of manufacturing, binding, wrapping and gluing machines, as well as two collaborative robots and conveyors. The dimensions of the room, the distances between the machines, the footprint of the conveyors on the arrangement are among the significant factors included in the assignment.
Simulations of the production process were carried out at defined productivity of each of the machines, speed of conveyors and different sizes and placement (on the output conveyor) of the products to determine the performance of the system and the utilization of the nodes.
Project details:
The requirements for the concept were that it be consistent with the real dimensions of all the machines, the distance between them and a limited area of the conveyors. The model of the production machine and the stacks of envelopes at the exit were created based on their actual dimensions and arrangement. Easy parameterization of the model allows changing the manufactured product and its layout on the output conveyor.
The collaborative robot type specified in the requirements turned out not to be available in the Visual Components eCatalog. This made it necessary to build a simulation model for the robots as well. Using a description of the geometry (from a CAD file) and data from its technical specification, we built its kinematic model. Since the design of a suitable gripper for the robots was not included in the assignment, we use a basic model of a gripper type “fork”.
The approach of the robot to the conveyor of the production machine required its path and movements to be optimized depending on the type of layout. The models of the other machines recreated their rough geometry, but their time characteristics such as: – working cycle time, were respected. Statistical and graphical information from the simulation process and from its individual nodes was added.
Simulation videos with specific parameters for the type of products and speed of the conveyors were recorded and provided to the client.
Link to Video